В Гарварде увлеклись созданием роботов из коктейльных трубочек - «Роботы»
Они могут быстро перемещаться по сложному рельефу, обладают малым весом и большой силой, способны пролезть в крохотную норку или перепрыгнуть большую преграду. Нет, это не роботы, а насекомые – в Гарварде полагают, что их строение самое универсальное во Вселенной. И вместо тяжелых, прочных металлических роботов нам нужно строить такие же гибкие гибридные конструкции.
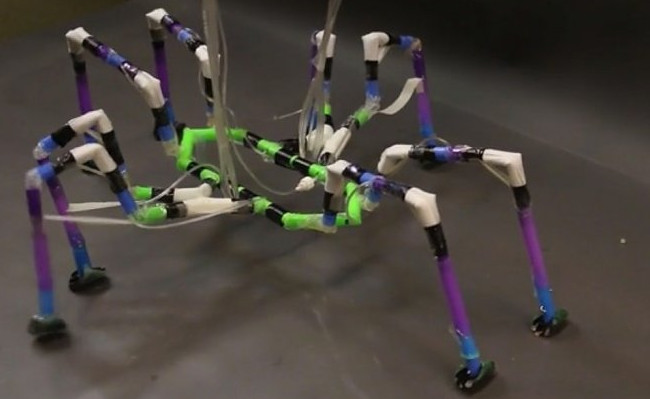
Если надрезать обычную трубочку для коктейля, ее легко согнуть по линии разреза. Теперь крепим по обе стороны от него резиновую полоску и подключаем к трубочке небольшой пневмо-механизм. Когда воздух поступает внутрь, трубочка раздвигается, а затем резинка возвращает ее в исходное состояние. Вот и моделирование движения простого сустава.

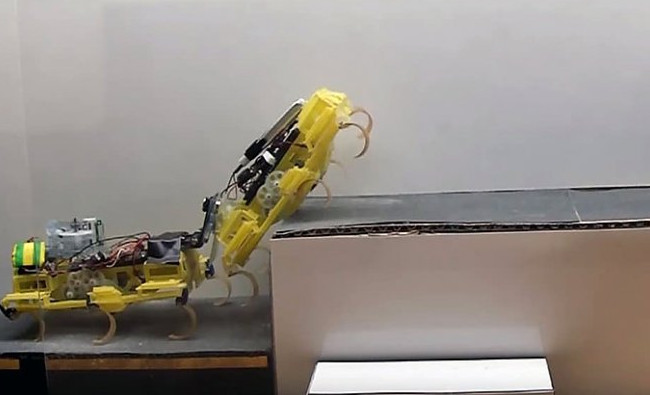
С двумя такими лапками робот уже может подтягивать и подталкивать себя к цели, на трех стоит вполне устойчиво, с четырьмя косолапо «ходит» даже по неровной поверхности. Ученые успешно протестировали шестиногую конструкцию, но с восьмью лапками столкнулись с неожиданными трудностями. И попутно выяснили, что робот из соломинок может плавать в заданном направлении.
«Восьминожка» продемонстрировал ключевой недостаток системы. Настоящий паук полностью контролирует все свои лапы и может в любой момент двигать каждую в любую сторону. А механической конечности с одной степенью свободы это не под силу – нужно создавать многосуставчатый манипулятор. Но это задача на уровень выше и дешевыми пластиковыми трубочками здесь не обойтись.
Более всего гарвардских ученых поразило то, насколько простой выходит конструкция робота при его-то всепроходности. Если задействовать композитные материалы, проработать единую систему управления давлением, создать алгоритмы движения для большего количества лапок… от перспектив дух захватывает!
Источник — Harvard
И будьте в курсе первыми!