Кофе поможет роботам-шагоходам перемещаться по бездорожью гораздо быстрее - «Роботы»

Одной из проблем применения роботов на бездорожье является то, что нельзя заранее предсказать рельеф поверхности, по которой им придется двигаться. Оптимальным вариантом пока что являются шагающие механизмы, но проблема актуальна и для них, только в меньшем масштабе. В первую очередь, речь идет о ступнях ног робота, которые непосредственно контактируют с рельефом – ученые из Калифорнийского университета в Сан-Диего предложили изготавливать их... из кофе.
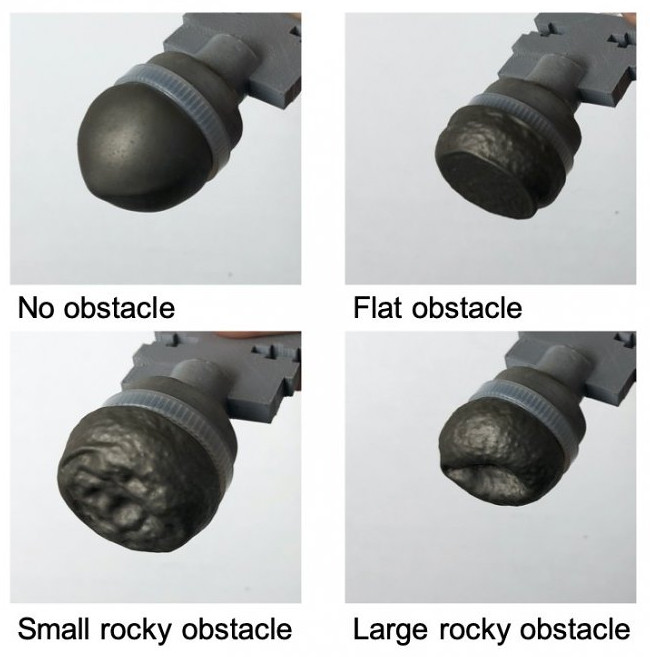
У сухой кофейной гущи есть такой эффект, как «гранулярное сцепление», когда при давлении масса кофейных частиц спрессовывается вместе. То, что создает проблемы бариста при готовке кофе, может помочь робототехникам. Если сделать опору ноги робота в виде гибкой латексной сферы с наполнителем из кофейной гущи, то при давлении на поверхность она будет деформироваться и принимать форму почти идеального протектора.
Такая конструкция может быть пассивной, когда робот просто встряхивает лапками, чтобы разрыхлить и подготовить смесь, или активной, когда для лучшего эффекта применяется вакуумный насос. Активная система будет эффективнее на максимально неровной поверхности, пассивная лучше подойдет для плоских склонов. При тестах на покрытии из гальки новые ноги робота обеспечили ускорение на 40%, потому что адаптируемые ступни не проваливались между камушками и не застревали там.
Глубина погружения в рыхлый материал, вроде щепок или опилок, при применении адаптируемого рельефа ступней снижается на 62 %. А усилие для вытягивания провалившихся ног робота падает на 98 %. То есть, в сравнении с примитивными жесткими ногами механизмы с кофейным наполнителем практически не вязнут в рыхлом грунте. После первых успехов ученые намерены добавить датчики поверхности и научиться менять рельеф ступни до того, как она коснется земли, оптимизируя каждый шаг.
Источник — UC San Diego Jacobs School of Engineering
И будьте в курсе первыми!








