Иран представил своего самого продвинутого робота-гуманоида - «Роботы»

О достижениях иранских ученых в области робототехники известно немного. Пожалуй, наибольшую известность получила серия роботов-гуманоидов Surena, разработанная исследователями Тегеранского университета. Первая модель появилась на свет чуть более 10 лет назад. Позже были созданы усовершенствованные версии – Surena II и Surena III.
Последнее достижение иранских робототехников – Surena IV, в создании которого приняли участие более 50 исследователей во главе с профессором Агилем Юсефи-Кома. По его словам, усовершенствованный робот может более точно отслеживать объекты, а его новые руки обладают большей ловкостью.
Изготовленные на заказ датчики усилия на ногах помогают Surena передвигаться по неровной поверхности, регулируя угол и положение каждой ноги. Скорость передвижения увеличилась с 0,3 до 0,7 км/ч. По своей конструкции он сравним с некоторыми своими более известными собратьями – UBTECH, Walker, Asimo, Talos, Hubo, AIST и HRP-2.
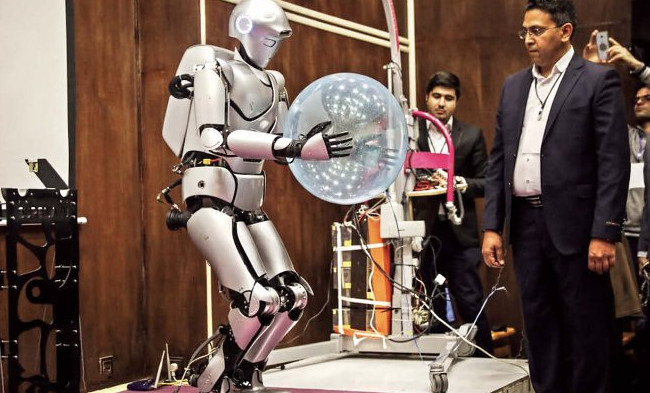
Surena IV имеет множество осей движения, особенно на руках. Команда значительно облегчила конструкцию, интегрировав в нее малые, но мощные приводы. В результате вес нового робота-гуманоида при росте 1,7 м составил всего 68 кг. Для сравнения, его предшественник Surena III при росте 1,9 м весил 98 кг.
Еще одна особенность – контроллер робота. Контур управления теперь работает на более высокой частоте (200 Гц), благодаря платам FPGA. Датчики включают стереокамеры, 6-осевые сенсоры силы/крутящего момента в лодыжках, энкодеры на всех суставах и инерциальный измерительный блок (IMU). Система преобразования текста в речь позволяет роботу распознавать речь людей и генерировать собственный ответ.
Чтобы заставить все датчики, контроллеры и исполнительные механизмы работать вместе, исследователи оснастили Surena IV собственной операционной системой – ROS. Они также использовали ПО Gazebo, Choreonoid и MATLAB для моделирования движений робота в разных условиях – в том числе ходьбы задом наперед, боком, поворотов и подъемов после падения.
Источник — IEEE
И будьте в курсе первыми!