Ученые скрестили двуногого робота и квадрокоптер (видео) - «Технологии»


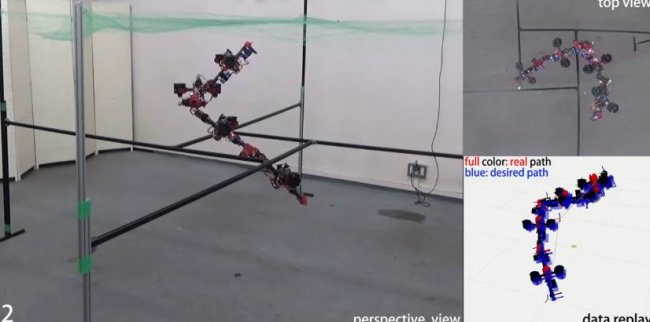
Исследователи Токийского университета создали робот-квадрокоптер, который может ходить по земле на тоненьких ножках. Спроектированный скорее для эксперимента, чем для выполнения каких-то практических задач, робот Aerial-Biped продемонстрировал неожиданную физическую характеристику – автоматически сгенерированную «походку» в полной синхронизации с работой четырех двигателей.
Собственная скорость ног робота при контакте с поверхностью нулевая, и упражнение в хождении достигается за счет физического симулятора. Пока что все его движения определяются дроном, но инженеры намерены добиться большего уровня свободы для тела и ног робота, чтобы в дальнейшем научить его выполнять даже танцевальные па.
Читайте также: Видео: создан дрон-трасформер, меняющий форму налету
Создатель робота Азуми Маекава ответил на вопросы журналистов:
- Что подтолкнуло вас к этой разработке?
Нас впечатлили предыдущие разработки двуногих роботов, управляемых «невидимой» силой: Magdan, который имеет электромагниты на обеих конечностях и может ходить по металлической пластине, и BALLU, который приводится в движение подъемной силой баллона с гелием. Метод создания траектории ходьбы в обоих случаях основан на допущении, что собственная скорость при контакте «ноги» с поверхностью равна нулю.
- Зачем квадрокоптеру ноги?
Пока что это эксперимент: робот, имитирующий поступательные движения на тонких ногах, подобно фламинго, без ухудшения динамических характеристик квадрокоптера. Такой подход позволяет пользователям без определенного опыта «хореографировать» двуногих роботов. Кроме того, эта система обходится намного дешевле по сравнению с обычным двуногим ходячим роботом.
- А какова практическая ценность и сфера применения таких роботов?
Это только прототип, но в будущем таких роботов можно использовать в качестве аниматоров, обучив их выполнению различных движений, а не только ходьбе, например, танцевальным фигурам. Я думаю, что эта работа также имеет потенциал для того, чтобы сделать виртуальную реальность возможной в физическом мире, открывая движения, которые были ранее были невозможны из-за ограничений механизмов и свойств реальных персонажей.
Читайте также: Создан робот-муха с питанием от лазерного луча (видео)
Источник: spectrum.ieee.org
И будьте в курсе первыми!