Гибкие автономные робозмеи окажут помощь в поисково-спасательных работах - «Роботы»
Команда исследователей Вустерского политехнического института — WPI (штат Массачусетс) получила грант на сумму 400 тыс. долларов от Национального научного фонда США на создание змееподобного робота, способного перемещаться среди завалов и в замкнутых пространствах при ликвидации последствий стихийных бедствий.
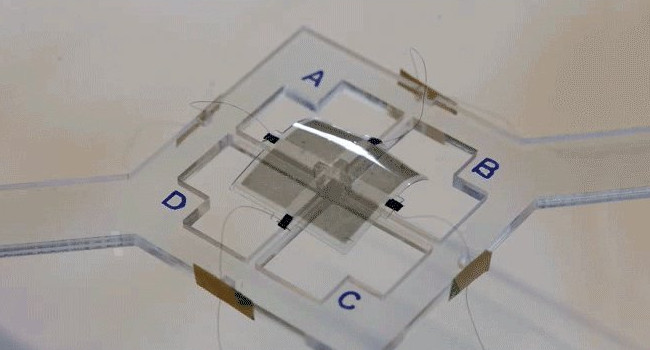
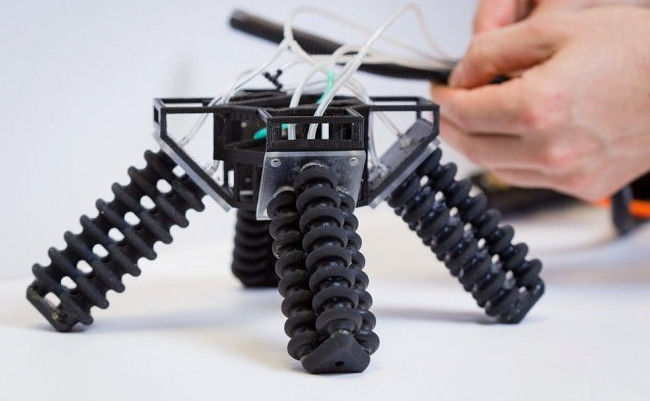
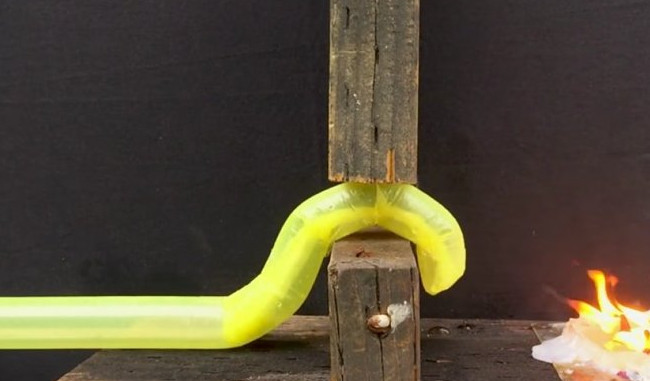
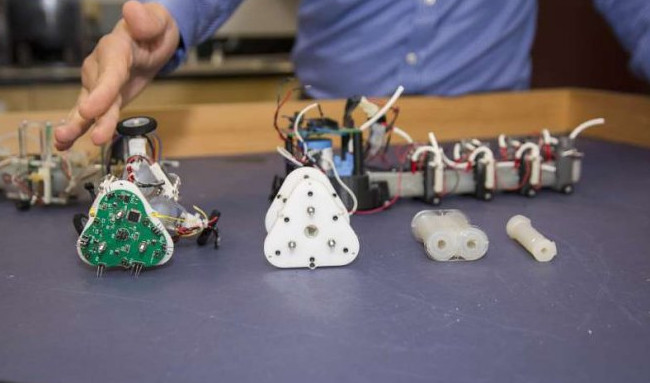
В рамках этого проекта ученые WPI создают мягких роботов, изготовленных из силиконовой резины. Они состоят из соединенных между собой модулей, каждый из которых имеет свои трубки, клапаны, пневматические приводы, интегрированные датчики и блоки управления.
Каждый сегмент мягкого робота способен производить свои собственные движения. В целом, движение робозмея представляет собой последовательную комбинацию отдельных движений каждого модуля.
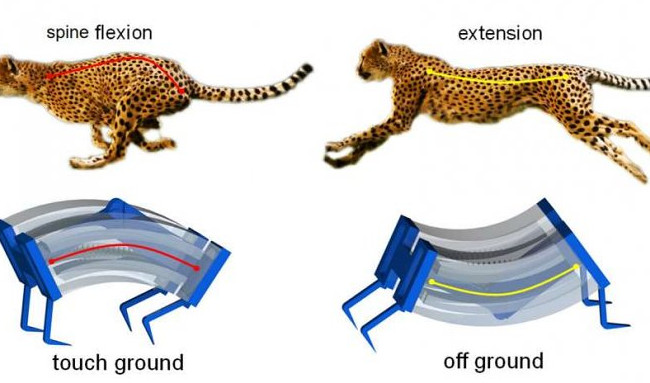
Мягкие роботы – значительный шаг вперед по сравнению с их жесткими собратьями, которые могут повредить объекты (или самих себя) при случайном столкновении. Мягкие роботы полностью избавлены от этого, потому что не имеют дискретных суставов. Они непрерывно сгибаются, что делает их более маневренными – особенно на крутых поворотах и в тесных завалах.
Недавно ученые WPI создали прототип мягкого змееподобного робота, которого они по заказу оснастили датчиками деформации. Они позволяют роботу с высокой точностью контролировать форму и положение своего тела – например, огибая обломки во время движения, или в положении лежа на спине. Как только робот осознает конфигурацию своего тела, он начинает лучше контролировать свои движения.
И будьте в курсе первыми!