Робот-каракатица самостоятельно преодолел подводный лабиринт - «Роботы»
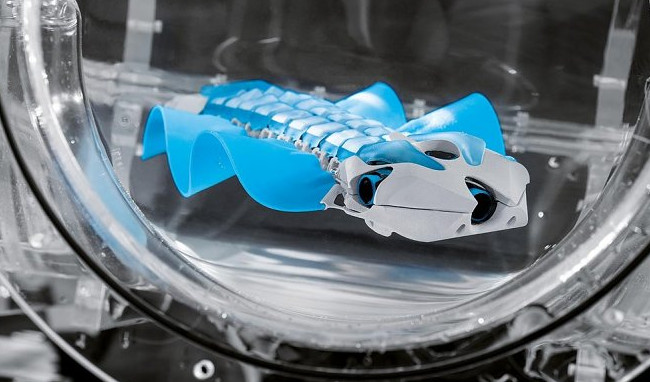
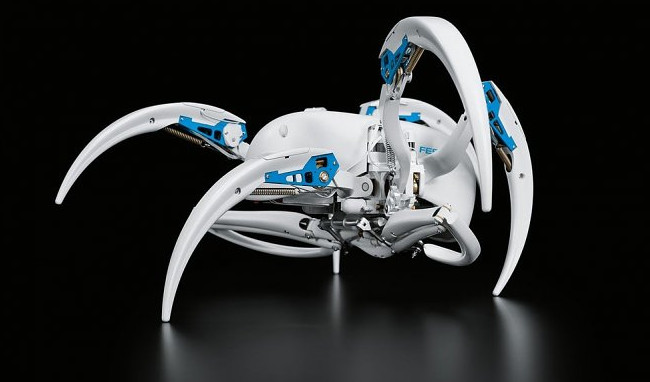
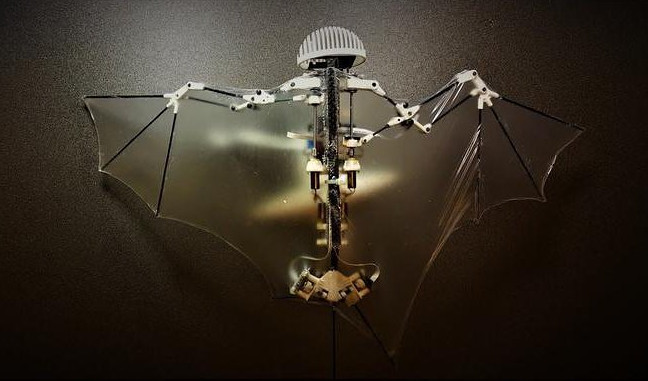
На торговой выставке во Франкфурте инженеры компании Festo представили BionicFinWave – автономного подводного робота, который имитирует естественные движения живой каракатицы. Он является идейным продолжателем бионического направления в роботостроении, когда шасси машин копирует принципиальные особенности движения реальных живых существ. В качестве недавних ярких примеров – робот-паук и летучая мышь от той же немецкой компании Festo.
Живая каракатица перемещается в толще воды за счет волнообразных движений двух боковых плавников, которые у BionicFinWave представлены гибкими силиконовыми пластинами. К каждой прикреплен массив из девяти рычагов, соединенных через плоский коленчатый вал с сервоприводами в теле робота. Их два и они независимы, что позволяет двигать плавниками с разной скоростью и совершать маневры в горизонтальной плоскости. А для смены курса по вертикали используется третий привод, который управляет шарнирным сочленением шасси.
Спереди и сзади конструкции пластиковые полости с положительной плавучестью, внутри которых спрятана электроника и батареи робота. Для ориентации на местности он использует ультразвуковые датчики, обнаруживая препятствия методом эхолокации, а глубину определяет по сенсору давления воды. В публичном эксперименте робот-каракатица прокладывал себе путь через лабиринт прозрачных акриловых труб и параллельно отсылал на внешнее устройство данные о своем местонахождении и температуре воды.
Длина робота 37 см, вес 430 грамм. Авторы разработки видят его применение в качестве самостоятельного измерительного комплекса для обследования подводных объектов, где требуется высокая точность движений. Большая часть деталей робота изготовлена на 3D-принтере, поэтому в теории нет проблем наладить их массовый выпуск для любых научных или промышленных нужд.
Источник — Festo
И будьте в курсе первыми!